
今回は、コウヘイ君が使っている鉄棒をご紹介します。
コウヘイ君か使っている鉄棒は、こんな理由から、100均(百円ショップ)の素材で作りました。
- 簡単に材料が手に入り、費用があまりからないこと(できれば1000円くらい)
- 組み立てが簡単なこと(30分くらい)
- 狭い部屋でも簡単に移動できることにと
- 作り直しや、改良が簡単にできること
- 失敗しても惜しくないこと
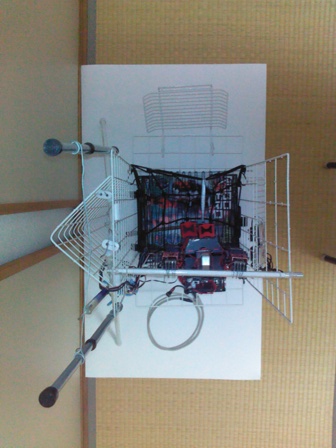
◆出来上がり
まず、でき上がりをイメージして下さい。
こんな感じです。



◆材料
下記データシートの項に記載しました。
◆組み立て
組み立てはこんな感じです。

◆鉄棒(バー)について、
- 金属のバーは滑ってグリップが効かないため、パイプをチューブに入れて外側を柔らいチュープで被覆した。
- 同時に握る接触面積をなるべく大きくすることで多少でもグリップが効くよう配慮した。
- 同様に握る接触面積を大きくし、摩擦を期待するためなるべく太いバーを目指した。
- その結果、外径で12mmを目安にした。(13mmでは、緩めて回転中に簡単に外れることがあった)

A:10(内径)-12(内径)のビニールチュープに8(内径)-10(外径)のビニールチュープを入れ、これに7Φアルミパイプを入れた。(現在これを使っています)
・10-12のビニールチュープに8-10を入れるとこは、すこぶる難しかった(CRCを用いても難しいのでお勧めできません)
B:7(内径)-11(外径)の耐圧ホースに7Φアルミパイプを入れた。
・CRCを使うと、7mm内径のホースに7Φのアルミパイプが簡単に入れることができた。(店員が教えてくれた)
C:家にあった何かのパイプ(11Φ)にケープルを束ねるスパイラルバンドを巻き、12.5Φとなった(以前はこれを使っていた)
上記A、B、Cに顕著な差異は見られなかったように思う。
要は、径とバーの表面が柔らかいこと(多少でもグリップが効くように。)が満たせれば、身近な素材で良いと思います。
現在は、肉厚が厚いこと、素材が柔らかいことから、Aを使っています。
お勧めは、Bです。(簡単に作れるから)
D:12-14のビニールチュープにAを入れたもの(太くなりすぎた)
E:100均で買ったテーピングをCに巻いた(グリップ効果に著しい改善は見られなかった)
そのほか、平ゴムを巻いたこともありますが、これは、緩めてもに滑らないためポツとなりました。
100均で隙間テープも使ってみましたが、よい結果は得られませんでした。
身近にあるパイプとしては、タオル掛けのパイプ、ツッパリポールの軸などいろいろあります。100均や、ホームセンターでも代用品も含めて簡単に手に入ると思います。
皆さんもいろいろやってみてください。そして、よい素材、方法が見つかったら(お持ちでしたら)是非、ご紹介下さい。
◆最近思うこと
ロボの指の形をみていると、うんていバーに合わせて設計しているのかも知れませんね。だとすると、最適な鉄棒の径は10Φ程度ということになるかも知れませんね。
(この記事を書いていて、やっと気付いたクマゲラでした。)
それから、上記の内容は、計測した訳でもなく、同時に同じ条件で実験して確認した訳ではありません。いろいろ試した結果の感じなので、身皆さんの結果と違うかも知れません。皆さんも、いろいろ試してください。
鉄棒のバーの条件がロボの動作への影響する度合いは、大きいと思います。とすれば、最初に検討して納得のいくバーを選定しておいたほうが良いかも知れません。後から、バーを変えると、それまでのモーションデータが合わなくなる可能性があることも記憶のどこかに留め置いて下さい。
(モーションデータへの影響要因1:バーの径と材質・・・・これからいろいろ紹介していきます。)
◇オマケ:ハンガーパネルの曲げについて
ハンガーパネルは、写真のような方法で曲げました。
曲げたいハンガーパネルルと堅めの木材をクランプで止めます。そして、Aのあたりを体重をかけてしっかり手で押さえ、Bのあたりを少しずつ曲げていくと簡単にきれいに曲がります。クランプは、百金で手に入ります。
良かったら試してみてください。(「そんなこと知ってら~」って怒られそうですが。)

◆データシート(材料)
- ハンガーパネル 大 3枚 (約60×30cm)
1枚は、あらかじめ長手方向を90度程度曲げておく - ハンガーパネル 小 3枚 (約30×30cm)
2枚は、あらかじめ端から四角2つ目のところ当たりで曲げておく - バー用パイプ 一本 (適当なもの)
アルミパイプ(外径 7mmφ) 外径12mm程度のビニールチュープ(ホームセンター)
タオル掛けの壊れ物、伸縮ポールの転用、その他身近にあるもの等 - 伸縮ポール 大 伸ばしたとき100cmくらい 2本(横揺れの補強材として)
- 伸縮ポール 小 伸ばしたとき70cmくらい 2本(電源、信号ケープル吊り下げ用)
- 自転車のカゴ用ネット 1つ(安全ネット用)
- 結束バンド 少々
- その他 適当なもの
たぶん買い出しも含めて(近くにお店があればてすが)、半日くらいで完成すると思います。是非、チャレンジ下さい。ロボゼロの鉄棒への想いが膨らんでいくことと思います。それがロホの鉄棒を完成させる原動力になっていきます。そして、本格的に鉄棒運動を楽しんでいる頃には、もっと本格的な鉄棒を作ることになるかも知れません。そのときに参考になるたくさんのノウハウが得られると思います。
また、この記事にとらわれず、皆さんの感性を生かして、いろいろ工夫して下さい。そして更に良い鉄棒を作って下さい。ぜひ、自分だけの鉄棒にチャレンジしてください。
皆様の鉄棒ができたら、是非、ご紹介下さい。また、もっと立派な、かっこいい鉄棒を作っている方も多いと思います。クマゲラとは違った視点から、紹介頂けるとうれしいです。

次回は、ロボの動き(調整)とバッテリについて感じたことをご紹介したいと思います。
よろしくお願いします。
0 件のコメント:
コメントを投稿